Homing modes¶
Overview¶
Axes without an absolute encoder can use the homing function to restore the position to a previously defined location.
This can be done at the current location.
CiA 402 profile specification: IEC61800-7-201:2015 defines different homing methods, SOMANET supports methods 33, 34, 35 and 37.
Homing method 33/34¶
Methods 33 and 34 (move to next or previous single-turn position or “index pulse”) can be used to center on the sensor’s reference position (in positive or negative direction).
The shaft will rotate less than one rotation.
Homing method 35/37¶
Methods 35 and 37 (zero the current position) are used to define the current position as home position.
Note
Homing method 35/37 can be performed in any operational state. All other homing methods require the drive to be in “operation enabled” state.
Use case: Homing on current position while operation is not enabled
If the axis is moved to a desired homing position by external force (for example manually), Homing Mode 35/37 can be used to determine the current position as home.
Use case: Relative position command
The current position can be taken as the reference point.
Use case: Homing on current position
When the motor is moved to the desired position in CSP the position can be taken as homing position.
Settings for homing mode¶
Homing method¶
You can select the desired homing method in object 0x6098: Homing Method.
Value |
Description |
Remark |
|---|---|---|
0 |
No homing method assigned. |
This is the default value. |
33 |
Homing on negative index pulse. |
|
34 |
Homing on positive index pulse. |
|
35 |
Homing on current position. |
Methods 35 and 37 are identical. |
37 |
Homing on current position |
Methods 35 and 37 are identical. |
Homing speeds¶
Two homing speeds must be selected in object 0x6099: Homing Speed: in a typical cycle, the faster speed is used to find the home switch and the slower speed is used to find the index pulse.
Note
Homing speeds are not required in method 35/37.
Homing acceleration¶
In object 0x609A: Homing Acceleration a value for acceleration during homing must be defined.
Note
An acceleration is not needed in method 35/37.
How to perform homing¶
The following diagram shows the steps that are necessary to perform the homing function.
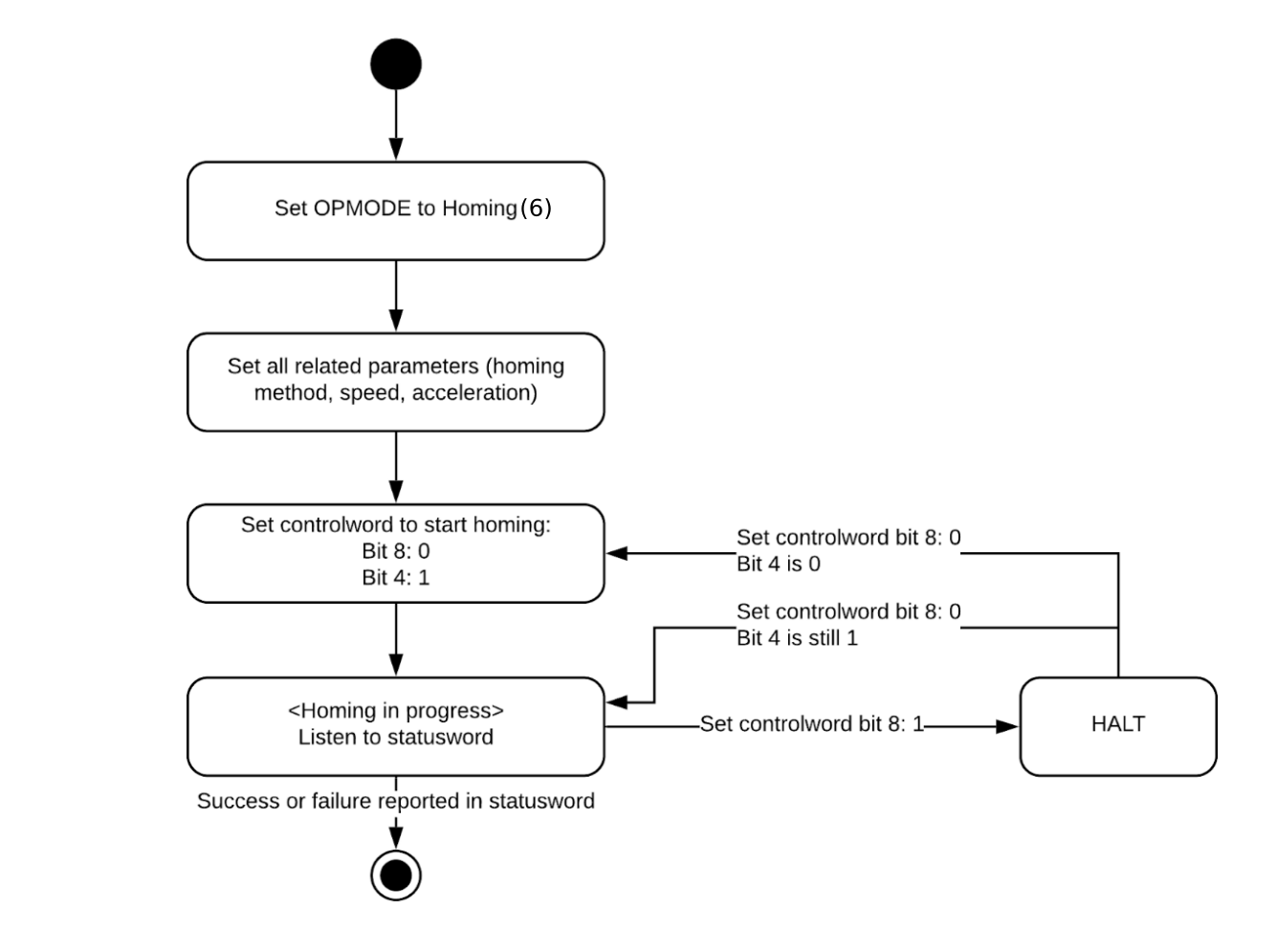
After the home position is found, the position controller stays active, holding the motor at that position (except for method 35/37).
Using the Halt bit¶
The halt bit (bit 8 of the Controlword can be used to stop the drive without disabling the controller:
Set the halt bit to 1 to stop the motion
When the halt bit is reset to 0, the motion continues
Objects used¶
Specifies the homing method that shall be used.
Offset from user’s zero position to the home position.
Speed with which to move during homing.
Acceleration used during homing.
Set bit 8 to 0 and bit 4 to 1 to start homing.
Indicates the current state of the homing process.
0x60E3 Supported Homing Methods
Array of supported homing methods.
