Velocity Offset for Feed Forward Control¶
To improve the positioning performance when the position reference is changing dynamically, an additional velocity offset is available in the cascaded controller.
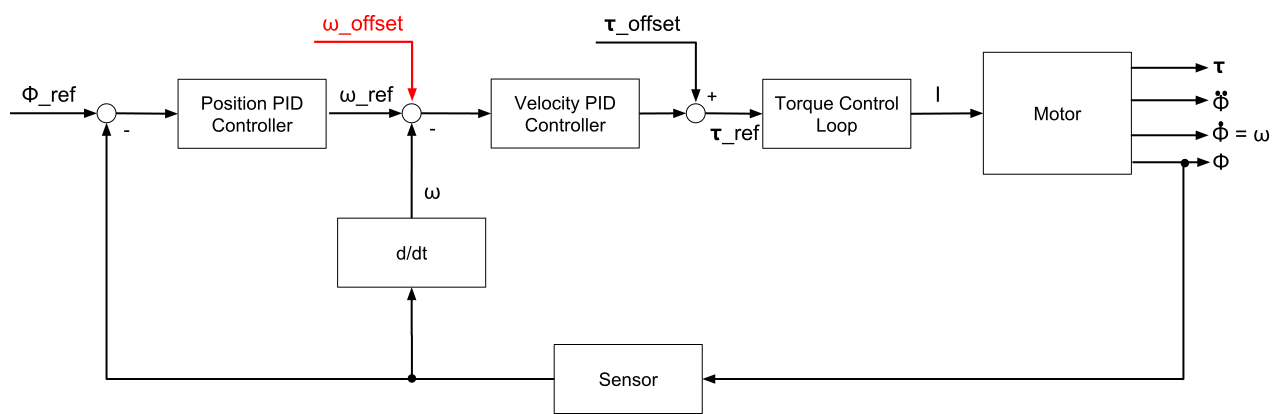
The working principle of this feature is based on the two different loops (position loop and velocity loop) that the cascaded control structure consists of: While the velocity controller generates the actual reference torque, the position controller generates the reference for the velocity controller. Therefore any change in the reference position first has to go through the position loop before reaching the velocity loop. To skip this step and thus improve the overall control performance, the velocity controller takes a velocity offset that is added to its reference value. It is typically gained by computing the derivative of the reference position and can be multiplied with a factor.
Note
As this value should be fed dynamically with continuously updated values, it is not accessible in OBLAC Drives, but through the EtherCAT parameter 0x60b1.
Note
This velocity offset must be computed by the master, it is not computed on the slave.
Values Kp, Ki and Kd for Torque Controller
Values Kp, Ki and Kd for Cascaded Position Controller (Both loops: Position and Velocity)
This object provides the offset for the velocity value.
