Firmware Overview 4.1¶
All SOMANET servo drives support cyclic synchronous modes of operation CSP, CSV, CST optimized for use in robotic applications. Firmware updates and storing of configuration files is possible via File over EtherCAT (FoE). Multiple concurrent encoders (for example BiSS, Hall) are supported.
An object dictionary according to CiA 402 is available, complemented with manufacturer specific objects to expand the feature set.
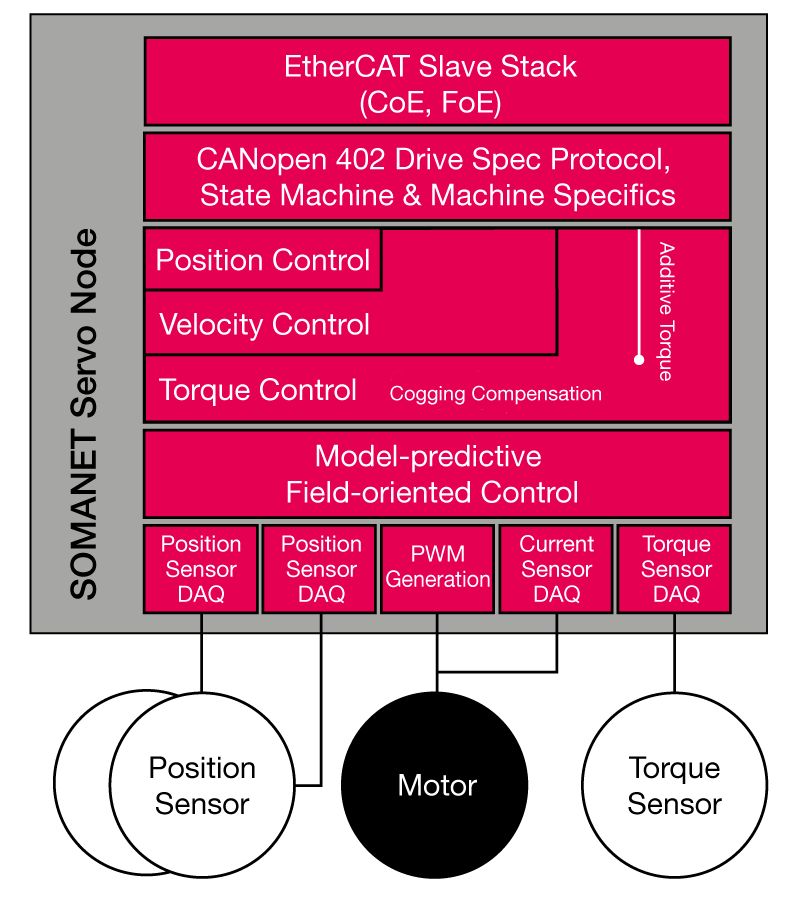
The following diagram depicts the basic architecture of the servo drive system:
Functionality description¶
Set of control architectures:
Field-oriented current control
PI and model-predictive current control
P, PI, PID and cascaded position control
P, PI, PID velocity control
Controller Auto-Tuning and manual tuning
Various configurable signal processing options (low pass filters, top notch filters)
Encoders configuration for all ports: BiSS-C, Hall, ABI (QEI) / ABZ Encoder, SSI
Access to Analog and Digital IO
Simple commissioning and tuning with OBLAC Drives
Extended control functionalities:
