Field Weakening¶
In many applications, it is required to extend the velocity range of an electric motor. In-wheel Automotive applications, gearless wind turbines and fast robotics are good examples of such applications. As shown in Fig. 1, “Field Weakening” is a feature that increases the speed range of a PM motor by weakening the magnetic field of the rotor linearly over the speed range.
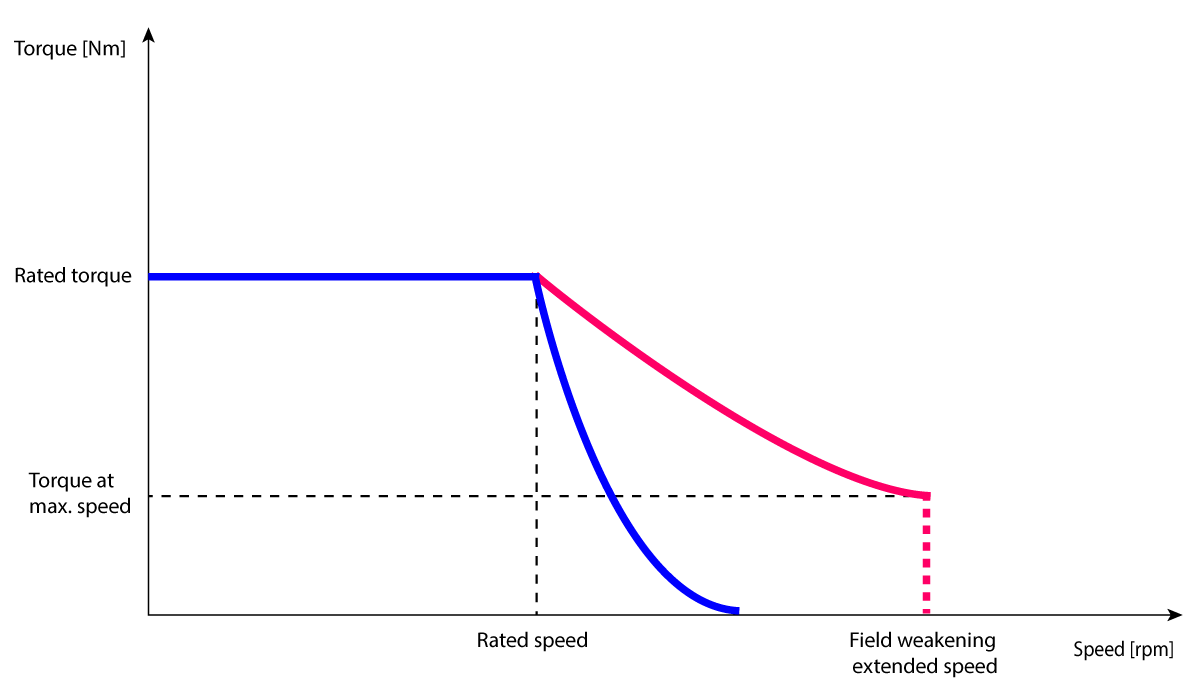
Fig. 1: Rated and extended speed range of a BLDC
As shown in Fig. 2, the user should set 3 parameters for this feature:
Field Weakening Starting Speed
Field Weakening Ending Speed
Percentage of Field Weakening (f)
Once the motor speed hits “Field Weakening Starting Speed”, the field weakening procedure starts to linearly reduce the magnetic field of rotor until the motor speed hits “Field Weakening Ending Speed”. The user can also determine how many percentage of rotor magnetic field should be finally reduced. As a result, the slope of rotor field reduction would be:
![\frac {-~ f [\%]} {Field~ Weakening~ Ending~ Speed - Field~ Weakening~ Starting~ Speed}](../../../../../_images/math/e07699bd531bca6d3b3333eeb022fb6865266c04.svg)
![unit~ given~ in : \bigg[ \frac {\%~ rated~ stator~ magnetic~ field} {rpm}\bigg]](../../../../../_images/math/8656b100d3f6260dab614c331e3be80506796fb4.svg)

Fig. 2: Percentage of field weakening in respect to motor speed
Note
The field weakening feature can not be enabled when the drive is in fault state.
Parameters needed for Field Weakening can be found in Subindices 4-8 of the object Torque Controller.
